Testing Adaptive Cruise Control using HERE HD Live Map

The necessity of high precision maps for automated driving is becoming clear, and the part those maps play has evolved from convenient to essential.
Advanced Driver-Assistant Systems (ADAS) are speeding up drivers’ transition from operator to passenger. As that transition progresses, and autonomous vehicles enter the roadway, highly precise maps will be increasingly necessary to provide a safe, comfortable ride for drivers and passengers.
Autonomous vehicles use many approaches to path planning & understanding drivable paths or lane boundaries. There are two common approaches:
The first approach is entirely sensor based. In said case, a vehicle uses cameras, radar, lidar, gyro, g-force etc to interpret its surroundings to navigate comfortably. The downsides of this approach are the requirements for a very expensive sensor array, and an extreme amount of onboard processing power. In addition, the vehicle can never “see” beyond the range of its sensors.
My team and I at VSI Labs conducted a project where we examined the second approach, which is to use vehicle sensor data in coordination with onboard maps. The question we aim to answer: what is the impact of using a standard definition map compared to a high definition map.
Testing Adaptive Cruise Control with high definition maps
Adaptive Cruise Control (ACC) systems enable a vehicle to maintain a safe, comfortable cruising speed based on the dynamic conditions of the roadways, rather than a static speed determined by the driver. Our first test was designed to examine what benefits a high definition map brings to ACC.
To test ACC, we had our control vehicle drive simulations using the HERE HD Live Map, and compare the result with driving the same road segment using a non-HD map. Already, we had an idea of what was going to happen, but we wanted to record the difference, test the scenario both ways, and have more clear data in hand to indicate the benefit.
Once we began looking at the differences in the maps provided to the vehicle, that is, getting into the information that each map type provided, the outcome was easier to predict.
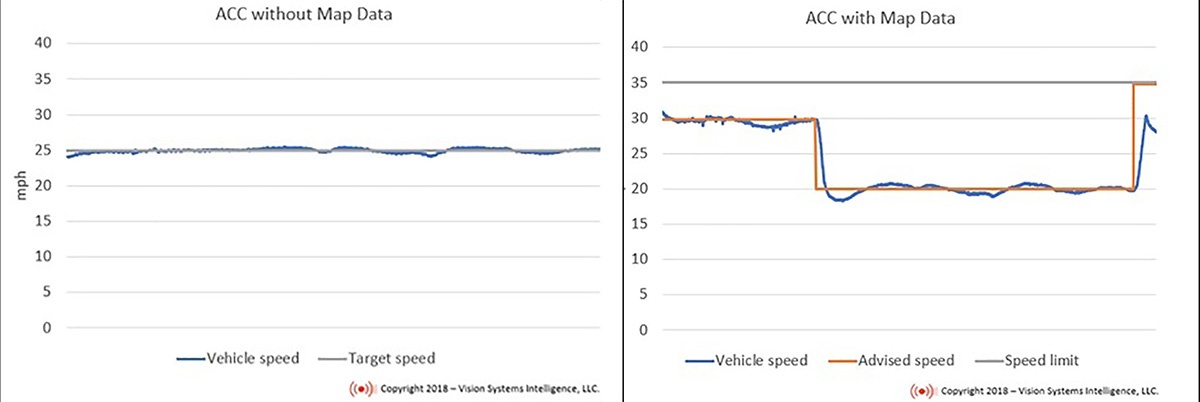
In the non-HD map, the recommended speed was the speed limit, and that remained somewhat constant (even through school zones, turns or other road curve changes). In the HERE HD Live Map, in every road segment, there were a set of points scattered throughout the segment. Each point within the segment had advised speed based on the road conditions – adapted from the curvature and oncoming condition changes.
This made testing very easy, since all we had to do was have the car follow the speed advisory from each map. The resulting experience for the passenger was dramatically different.

Negotiating the curve
We tested the two methods a selected a set of real-life highways and roadways with turns, sharp curves, dynamic speed limits (e.g. school zones), and parclo interchanges.
As you may guess, a curved roadway segment where we set speed limit of 25 mph results in the vehicle working to maintain a speed of 25 mph regardless of the conditions of the road.
In the HD Live Map, the advised speed sent to the vehicle is dynamic, approaching the speed limit in the straightaways, and slowing where the turns are sharper. This is more akin to how a human driver would negotiate those roads. It easy to imagine, but by collecting the data, we can see the difference clearly and empirically.
We will be continuing to test scenarios for high definition maps in the future, but our conclusion from this test, as well as our working hypothesis, is that High definition maps increase the performance/safety of ADAS/ACC systems.
If you would like to read our full study on HD Live Maps and ACC, you can download it here.

Have your say
Sign up for our newsletter
Why sign up:
- Latest offers and discounts
- Tailored content delivered weekly
- Exclusive events
- One click to unsubscribe